2021.12.24 本研究室の大坂淑朗君がSI2021で優秀講演賞を受賞しました.
大坂淑朗, Bandara D.S.V., 野上大史, 荒田純平, “医療ロボットへの応用を目指した可変剛性機構に関する研究,’’ 計測自動制御学会システムインテグレーション部門講演会予稿集, 1C1-05, 2021.
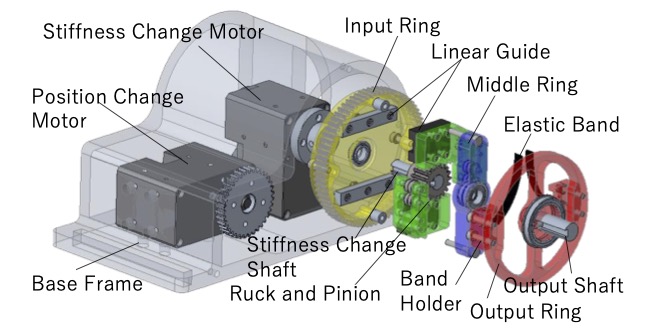
Abstract : Generally, a highly rigid surgical robot enables accurate positioning, but may cause damage when it
contacts the surrounding tissue. We designed and fabricated a variable stiffness mechanism with a wide range
of low stiffness by setting one end of the elastic body as a free end. In this paper, the concept of mechanism,
implementation and its preliminary evaluation are introduced.