25th December 2020, Our student member Mr.Kawanaka received SI2020 Excellent Presentation Award.

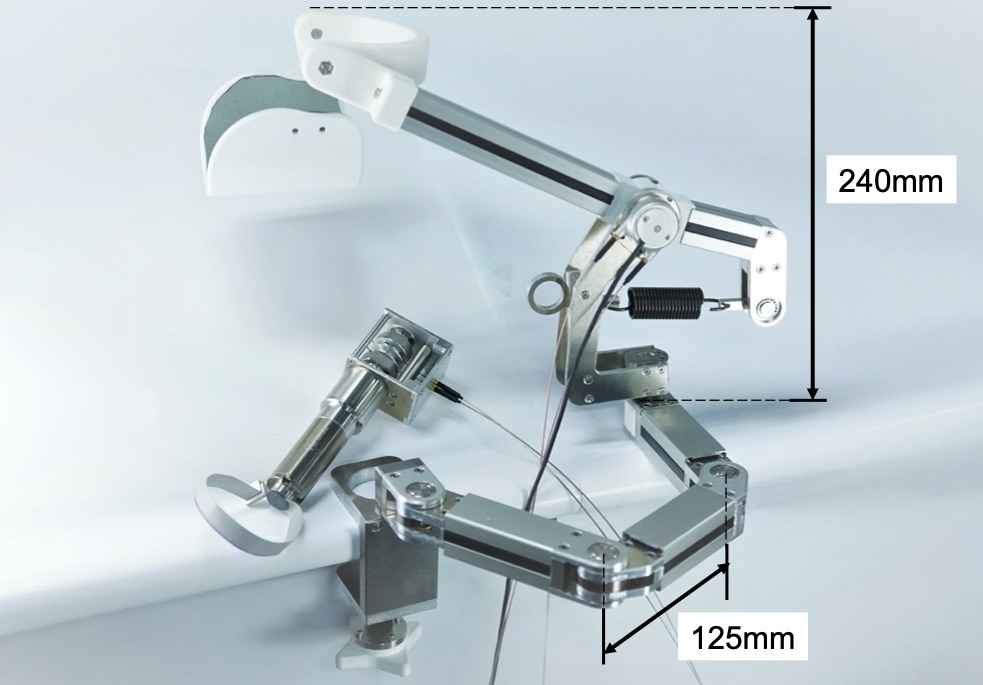
Title: Upper Limb Rehabilitation Robot Implemented with a Remote Actuation System
Authors: Takemi KAWANAKA (Kyushu Univ.), Ryu NAKADATE (Kyushu Univ.), and Jumpei ARATA (Kyushu Univ.)
Abstract : Robots for rehabilitation are required to be small and lightweight so as not to hinder the movement of the user. In this study, we designed and manufactured a Remote Actuation System (RAS) using two sets of tubes, wires and pulleys. RAS was implemented on a prototype of upper limb rehabilitation robot to test its feasibility.